The mechanical-electro-hydraulic system emerges as a new technology when fundamental disciplines such as mechanical science and control science achieve full development, and results from multidisciplinary intercross and integration. The inter-discipline research brings more academic developing fields and issues, and is highly conducive to fostering postgraduate students’ innovative thinking and enhancing their scientific research ability. Sponsored by the first batch of the JLU Funding Program on Interdisciplinary Scientific Research Group, Prof. Liu Chunbao’s team combined flow transmission with bionics, biomechanics, material science, etc., and published a series of research results of skeletal muscle-like soft actuators iniScience(IF=5.458), a sub-journal ofCell,andBio-design and Manufacturing(IF=6.302), a T1 journal of the Chinese Mechanical Engineering Society. The articles are entitled “Bioinspired actuators with intrinsic muscle-like mechanical properties” and “Bioinspired soft actuators with highly ordered skeletal muscle structures”, respectively (with doctoral student Wang Yingjie as the first author and Prof. Liu Chunbao and Prof. Ren Lei as corresponding authors).
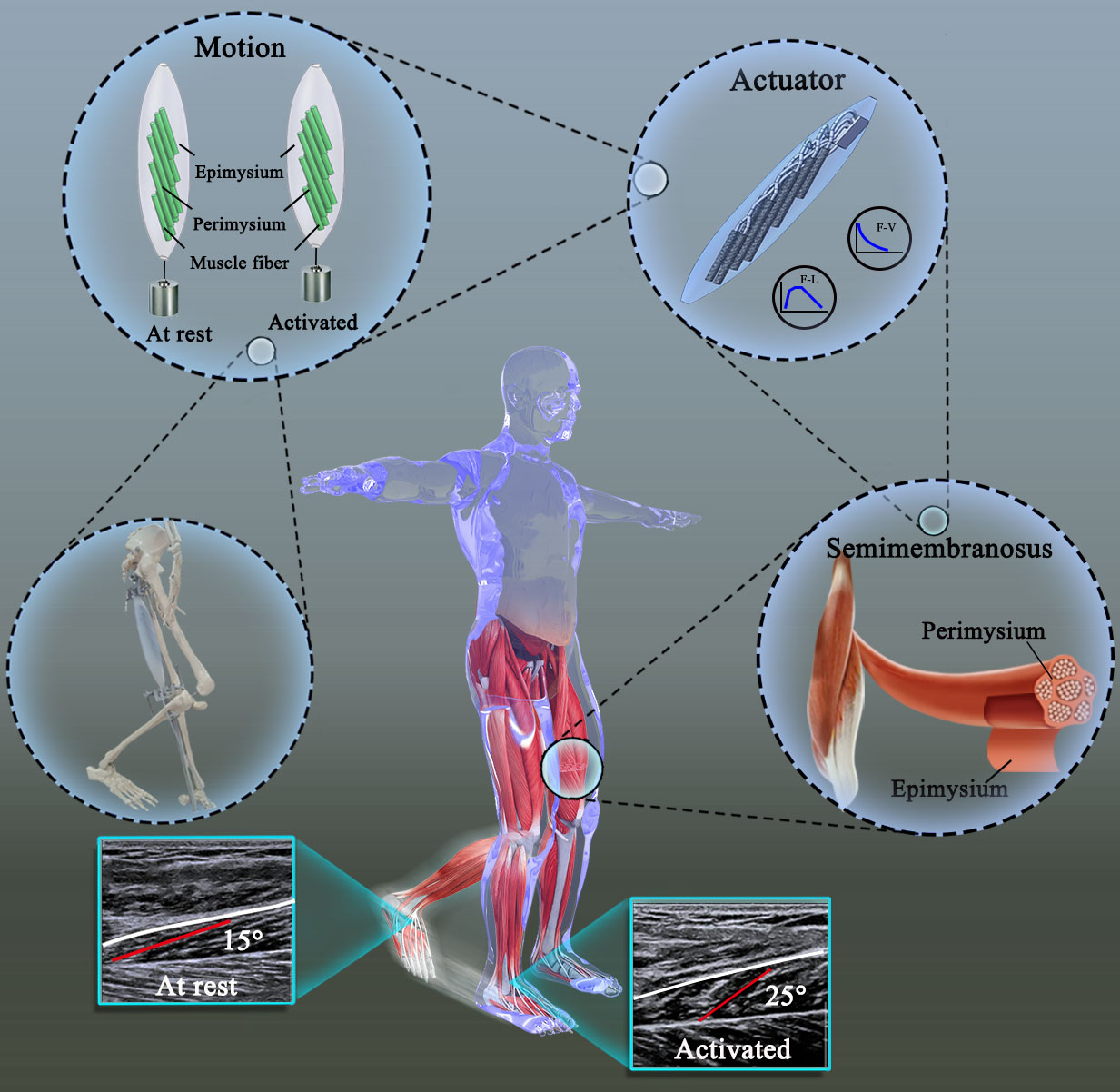
Skeletal muscle-like soft actuators are inspired by the structure, muscle fiber configuration, and movement mechanism of skeletal muscle, provide a variable transmission mechanism through the self-adaptive deformation of flexible material, and automatically regulate speed output according to external loading conditions without sensing and control. The muscle-tendon system-like soft actuator developed by the team has the strength-speed property and can lift heavy objects that are 220 times higher than itself, with 0.32 MPa of stress and 11.6% of strain. It integrates the contraction property and mechanical property of high stress, strain, and watt density of skeletal muscle-like soft actuators. The research result has a broad application prospect in bionic robots, active prostheses, exoskeletons or rehabilitation robots, etc.
The research is also funded by National Natural Science Fund Integration Program (No. 91948302), Key Program (No. 91848204), and General Program (No. 52075216).
iSciencehttps://doi.org/10.1016/j.isci.2021.103023
Bio-design and Manufacturinghttps://doi.org/10.1007/s42242-021-00148-1

