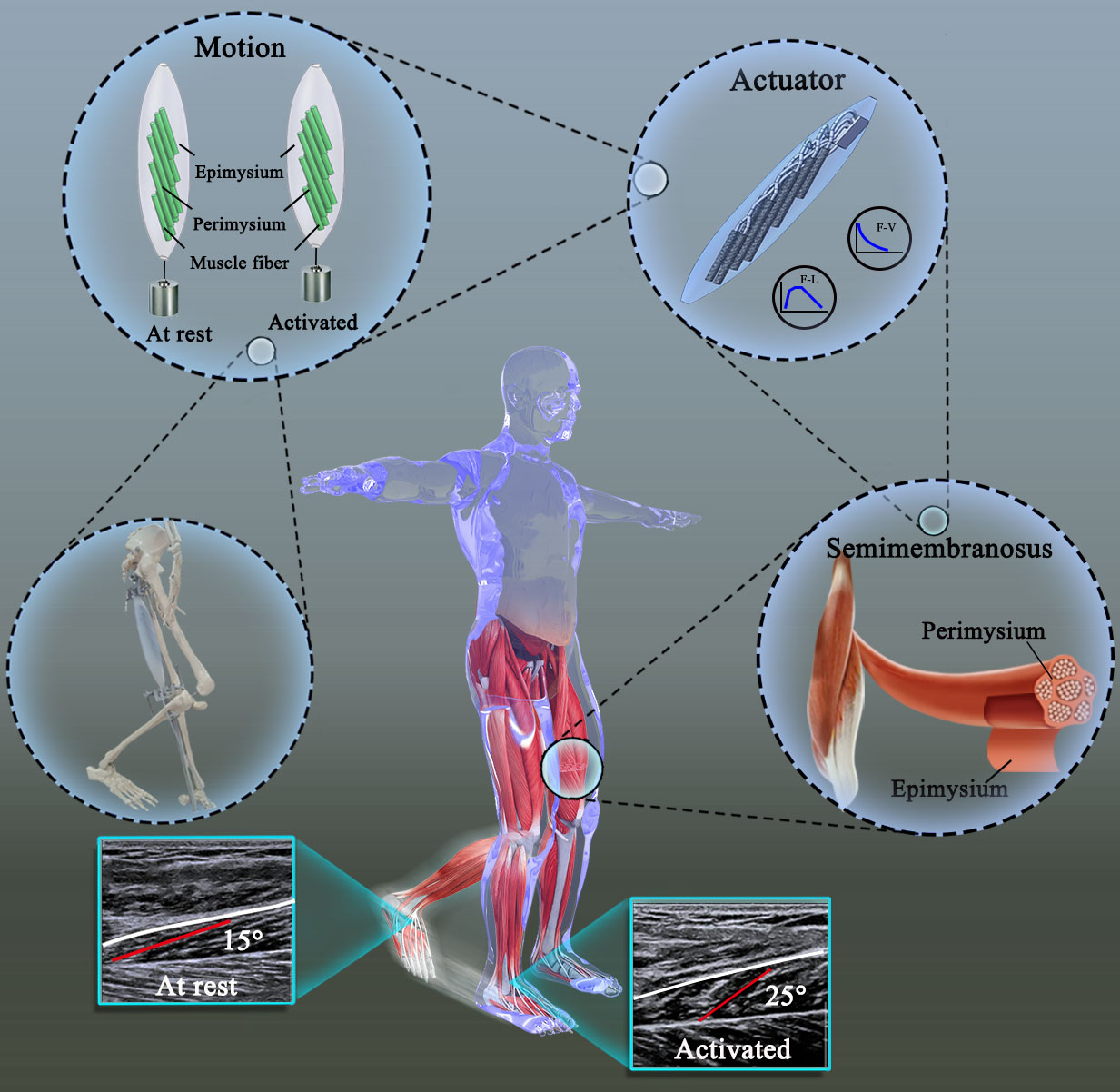
机电液系统是在机械、控制等基础性学科充分发展的前提下出现的一种新型技术,是多学科相互交叉、相互融合的结晶。交叉学科研究易产生学术增长点,对培养研究生创新思维和科研能力提升多有裨益。在首批吉林大学交叉学科科研团队资助计划项目支持下,刘春宝教授团队将流动传动与仿生学、生物力学、材料科学等相结合,在Cell子刊iScience(IF=5.458,中文译名:交叉科学)和中国机械工程学会T1期刊Bio-design and Manufacturing(IF=6.302)上,分别以“Bioinspired actuators with intrinsic muscle-like mechanical properties”和“Bioinspired soft actuators with highly ordered skeletal muscle structures”为题,发表了仿骨骼肌柔性驱动器系列研究成果(博士生王影杰为第一作者,刘春宝教授与任雷教授为通讯作者)。
仿骨骼肌柔性驱动器以骨骼肌的结构组成、肌纤维构型及其运动机理为灵感,利用柔性材料的自适应变形提供可变传动机制,自动根据外部负荷条件调节速度输出,而不需要传感和控制。团队开发的仿肌肉-肌腱系统柔性驱动器,该驱动器具备力-速度特性,应力可达0.32MPa,提升自身220倍重物,应变可达11.6%,实现了仿骨骼肌驱动器高应力应变和高功率密度的收缩特性和力学特性的集成。在仿生机器人、主动假肢和外骨骼或康复机器人等领域具有广泛的应用前景。
研究还受到了国家自然科学基金集成项目 (No. 91948302)、重点项目 (No. 91848204)、面上项目的支持 (No. 52075216)。
iScience https://doi.org/10.1016/j.isci.2021.103023
Bio-design and Manufacturing https://doi.org/10.1007/s42242-021-00148-1